
5月28日,由鼎捷数智主办的“2026(第五届)数智未来峰会”在上海举办。本届峰会以“AI空间觉醒・智启新质生产力”为主题,聚焦人工智能在制造业与产业场景中的深度落地,围绕智能制造、工业AI、数字化转型等方向展开交流与展示。

作为触觉具身智能领域代表企业,上海新智具身智能科技有限公司(NeoteAI,以下简称“新智具身”)受邀参加本次大会,并现场展示了搭载高精度视触觉传感器的机械臂精细操作Demo。
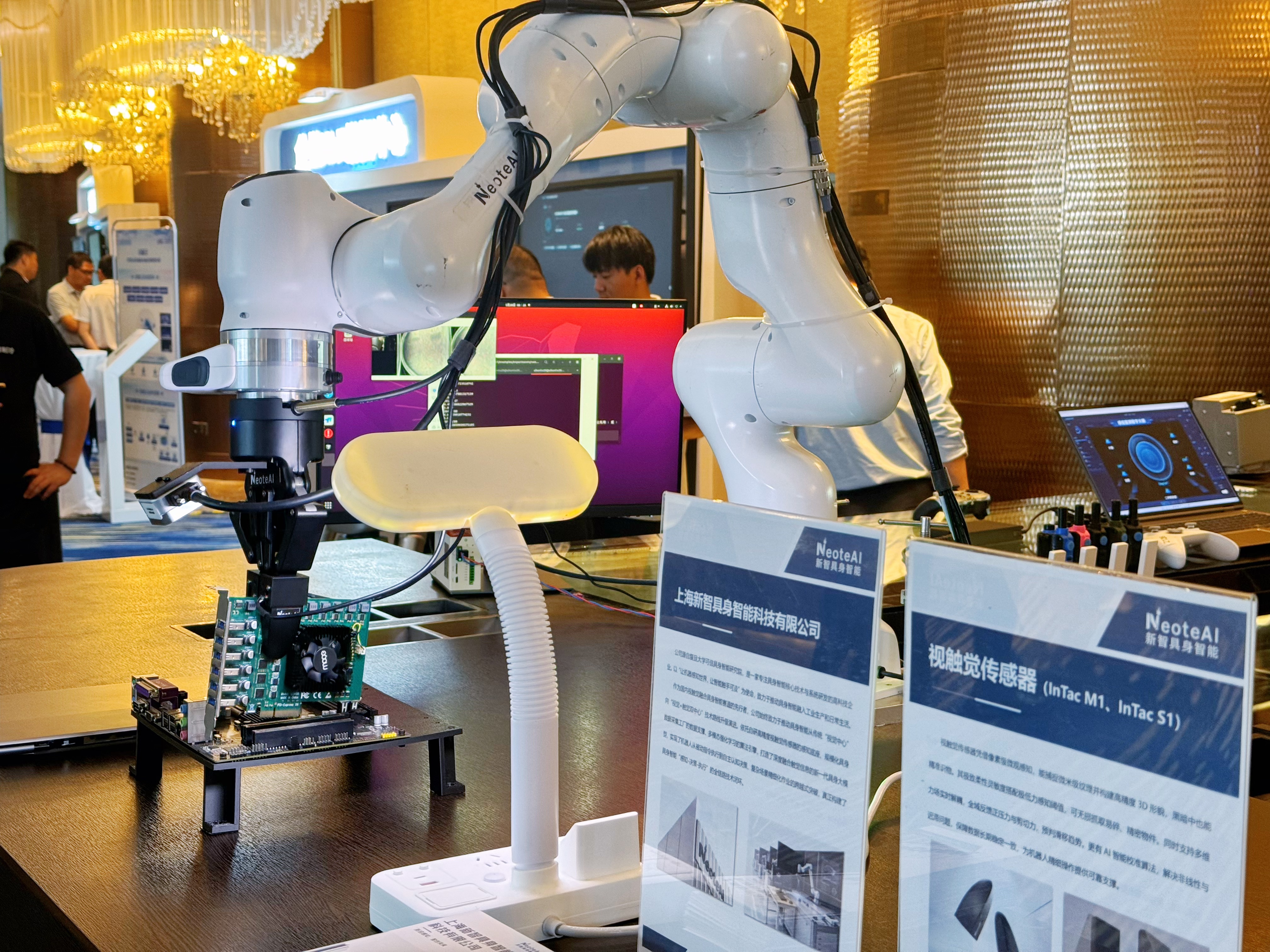
此次展会现场,重点演示了机器人进行网卡插拔任务的全过程。机械臂通过搭载公司自研InTac系列高精度视触觉传感器,在插接过程中实时感知接触力、滑移、形变与接触边界变化,实现对插入力度、角度与路径的动态调整,完成高精度插拔操作。

新智具身·视触觉传感器
相比传统仅依赖视觉定位与固定轨迹的机器人方案,视触觉技术能够让机器人在“接触发生之后”继续获得实时反馈能力。

在实际工业场景中,很多精细操作的难点并不在于“看见”,而在于“接触”。例如连接器插拔、线束装配、精密部件安装等任务,往往需要机器人在操作过程中持续判断阻力变化、插入状态与接触稳定性。而此次展会现场展示的网卡插拔任务,正是典型的高精度精细化操作场景。
在Demo演示过程中,机械臂不仅能够完成插入动作,还能够在接触过程中动态感知受力异常与微小偏差,并通过模型实时调整动作策略,提升插接成功率与操作稳定性。
这一能力背后,是公司正在构建的“传感器—数据—模型”完整技术体系。其中,视触觉传感器负责采集机器人与物理世界接触过程中的高密度触觉信息;数据平台则将这些接触信息组织为可训练的数据样本;最终再进入VTLA、触觉世界模型以及强化学习框架中,持续提升机器人在精细操作任务中的泛化与稳定能力。
当前,具身智能行业正从“本体展示”逐步走向真实场景落地。相比开放环境中的通用任务,工业场景对于机器人精细操作能力、稳定性与可重复性提出了更高要求。
连接器插拔、柔性装配、线束整理等任务,对机器人而言最大的挑战,往往来自接触过程中的物理反馈。而触觉,正在成为机器人深入真实物理场景的重要能力补全。
未来,公司将持续推动视触觉技术在工业装配、柔性操作、非刚性物体处理等精细化场景中的落地应用,并进一步加速触觉数据与具身模型的融合训练,推动机器人从“看得见”迈向“摸得准”。
END